Trout Swimming
Trout is a typical subcarangiform swimmer. Based on the high-speed videos from our collaborator, a high-fidelity computational model of trout swimming has been built to explore the hydrodynamic roles of the dorsal, anal and caudal fins. Particular attention has been paid to the special spanwise morphing of the caudal fin. (This work was presented at our MURI review meeting in September 2016.)
Jack fish swimming
Jack fish possesses a lunate caudal fin and performs Carangiform swimming motion. This project is to reveal the hydrodynamic benefits of its particular body geometry and propulsor shape. (This work was presented at our MURI review meeting in March 2016.)
Manta ray swimming
Manta ray swims by flapping its flexible pectoral fins. According to our observation, manta pectoral fins exhibit a large twist in the distal region. Our simulation showed that this twist deformation enables the fins generated more concentrated wakes, which is responsible for the high efficiency of swimming. Analysis of the swimming pattern of the manta provided a baseline for the creation of a bio-inspired underwater vehicle, MantaBot.
APS flow gallery (Nov. 2015)
Thrust producing mechanisms in ray-inspired underwater vehicle propulsion
A computational study of the hydrodynamics of a ray-inspired underwater vehicle was conducted concurrently with experimental measurements. High-resolution stereo-videos of the vehicle’s fin motions during steady swimming are obtained and used as a foundation for developing a high fidelity geometrical model of the oscillatory fin. A Cartesian grid based immersed boundary solver is used to examine the flow fields produced due to these complex artificial pectoral fin kinematics. Simulations are carried out at a smaller Reynolds number in order to examine the hydrodynamic performance and understand the resultant wake topology. Results show that the vehicle’s fins experience large spanwise inflexion of the distal part as well as moderate chordwise pitching during the oscillatory motion. Most thrust force is generated by the distal part of the fin, and it is highly correlated with the spanwise inflexion. Two sets of inter-connected vortex rings are observed in the wake right behind each fin. Those vortex rings induce strong backward flow jets which are mainly responsible for the fin thrust generation.
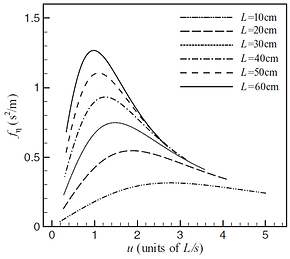
Optimal energy-utilization ratio for long-distance cruising of a model fish
The efficiency of total energy utilization and its optimization for long-distance migration of fish have attractedmuch attention in the past. We presents theoretical and computational research, clarifying the above well-known classic question. Here, we specify the energy-utilization ratio as a scale of cruising efficiency, which consists of the swimming speed over the sum of the standard metabolic rate and the energy consumptionrate of muscle activities per unit mass. Theoretical formulation of the energy-utilization is made and it is shown that based on a basic dimensional analysis, the main dimensionless parameters for our simplified model are the Reynolds number (Re) and the dimensionless quantity of the standard metabolic rate per unit mass (Rpm). Our results show the following: (1) When the efficiency attains a maximum, the dimensionless parameter Rpm keeps almost constant for the same fish species in different sizes. (2) The tail beat period is an exponential function of the fish body length when cruising is optimal, e.g., the optimal tail beat period of Sockeye salmon is approximately proportional to the body length tothe power of 0.78. Again, the larger fish’s ability of long-distance cruising is more excellent than that of smallerfish. (3) The optimal swimming speed of a adult sockeye salmon is about 1 body length per second which is consistent with previous researchers’ estimations.
Flow control by means of a traveling curvature wave in fishlike escape responses
Fish usually bend their bodies into a “C” shape and then beat their tails one or more times to escapefrom predators (in nature) or stimuli (in experiments). This maneuvering behavior, i.e., the C-shape bendingand the return flapping, is called C-start. It has been found earlier that a typical C-startmotion consists of (1) a main C-shape bending and (2) a rearward travelling curvature wave which was seldommentioned in previous studies. Our work shows that the travelling curvature wave can significantly improve the escape performance in terms of the acceleration and turn angle. Further analysis demonstrates that this travelling curvature wave enhances the vortices strength and redirect the jet induced by the vortices in the wake, which generate a higher thrust and torque.
Bending with a travelling wave
Bending without a travelling wave